MOTORES DE PASOS
Los motores de pasos, tienen 2 bobinados por separado, y juegan con las diferentes posibilidades de orientación.
Cuando cogemos un motor de pasos hay que identificar las bobinas.
Hay motores de pasos de 4 , 6 cables, dependiendo si tienen conexionados a mitad de la bobina.
En nuestro caso solo tenemos 4 cables, para saber cuales están emparejados, con un polímetro y medimos resistencias, y eso nos dará la resistencia del bobinado, que podremos usar para calcular las intensidades que estén circulando por ellas.
Otra opción es simplemente juntar las bornas e ir viendo si hay algún tipo de resistencia.
La teoría de funcionamiento, sería la siguiente.
| Paso 1 | +Vcc | -Vcc |  |
||
| (Semi-)Paso 2 | +Vcc | -Vcc | +Vcc | -Vcc |  |
| Paso 3 | +Vcc | -Vcc |  |
||
| (Semi-)Paso 4 | -Vcc | +Vcc | +Vcc | -Vcc |  |
| Paso 5 | -Vcc | +Vcc |  |
||
| (Semi-)Paso 6 | -Vcc | +Vcc | -Vcc | +Vcc |  |
| Paso 7 | -Vcc | +Vcc |  |
||
| (Semi-)Paso 8 | +Vcc | -Vcc | -Vcc | +Vcc |  |
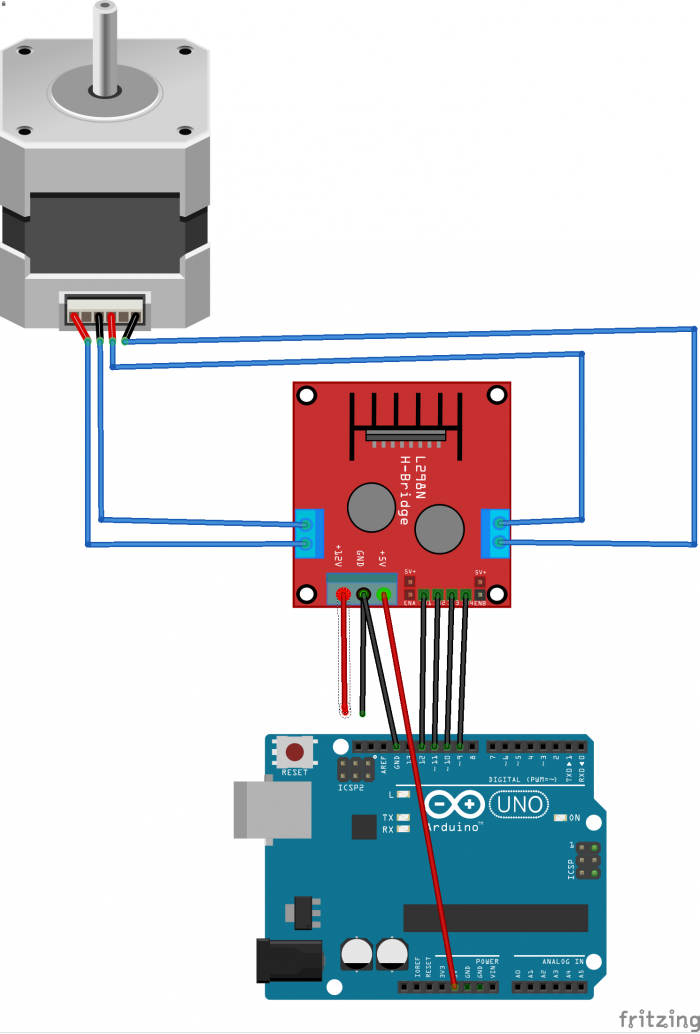
Para el control de este tipo de motores, Arduino ya dispone de una librería, aunque esta librería tiene un tema, y es que frena el motor usando los 2 bobinados haciendo que el motor y el driver ser calienten mucho.

Éste sería el montaje, que necesitamos hacer, con cada una de las entradas, controlaremos cada una de las salidas.
Y el código asociado sería el siguiente
#include <Stepper.h>;
#define A1 9
#define A2 10
#define B1 11
#define B2 12
#define STEPS 200
Stepper motor(STEPS,A1,A2,B1,B2);
void setup()
{
motor.setSpeed(100);
motor.step(200);
motor.step(-200);
delay(1000);
}
void loop()
{
}