Comencemos con la electrónica.
Cables
Los cables podemos comprar varias bobinas de colores, pero siempre se enredan los cables, la recomendación utilizar cable de datos de ordenador UTP de 6 cables u 8 cables.
Para cada motor vamos a necesitar 4 cables, pero por ejemplo en uno de los laterales tendremos que poner el final de carrera del ejeX, con lo que que ya tenemos 6 cables a usar.
Para el motor del eje X también necesitaremos 4 cables, pero el láser puede necesitar 2 o 4 según si llevamos ventilador, control del driver.
Con lo que los cables nos vienen justos.
Comprar de sobra 3x EJE Y + 1 x EJEX + un metro mas, es barato y más vale que nos sobre un poco.



Para los motores hemos pillado unos conectores ya montados, se complica el grimpado sino , y hacemos el empalme de los cables, atención a la secuencia de colores.


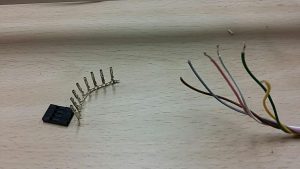

Como saber el orden de los conexiones. aquí tenemos un post
Y hasta aquí la parte eléctrica de los motores.
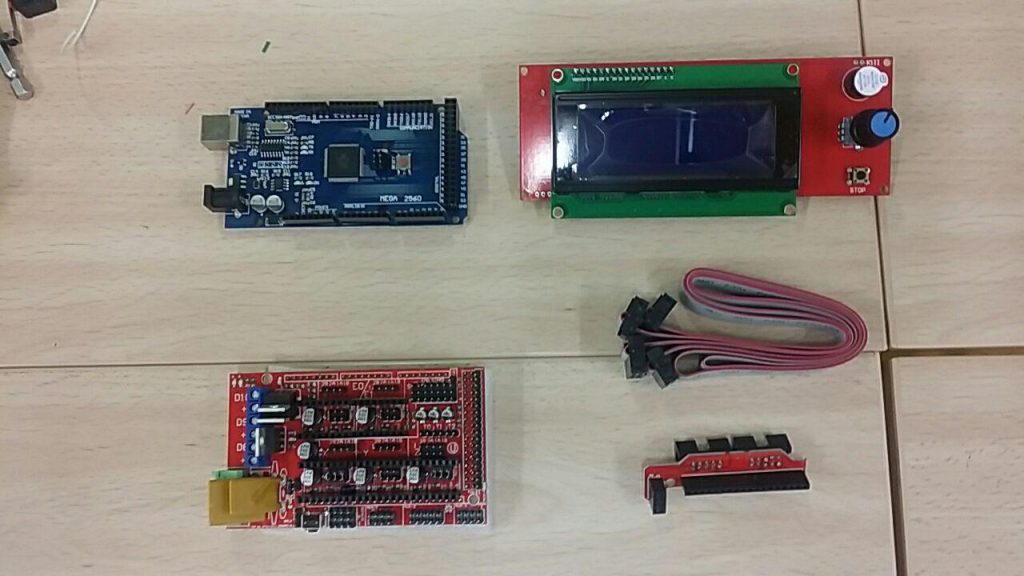
Electrónica.
El sistema está basado en la electrónica de una impresora 3d pero nos ahorramos el eje Z a menos que le pongamos un sistema de enfoque, que nosotros no lo hemos hecho.
El láser que hemos cogido tiene controladora propia.


Le hemos puesto una alimentación de con una fuente de 220 a 12 v 8 Amperios


Debemos también preparar la ramps para trabajar.
Le vamos a meter micropasos, que hará que los movimientos sean más suaves, los drivers que hemos cogido pueden hasta 16 micropasos, hay otros drivers que pueden hasta 32, pero no es necesario hilar tan fino



Mucho cuidado al montar los drivers de los motores, si no los ponemos en la posición correcta los podremos fundir.
Tendremos que subirle el firmware preparado para trabajar con la láser.
Para cada láser habría que editar el fichero de configuración, con los tamaños de nuestra láser y el nombre.


También tendremos que cablear nuestro driver de láser.

El control del driver del láser se hace por el pin digital 6 (PWM)